


CANopen型PLC与泰科伺服驱动器之间通信与测试
本文章以泰科智能的IDM640-8EIA系列产品为例子,介绍CANopen型PLC与伺服驱动器之间的通信及其设置。
IDM640-8EIA-CANpen
| |||
问题: | 对于泰科智能驱动器CANopen连接是一个较为复 | ||
| IDM640-8EIA-CANopen | ||
PLC:施耐德CANopen功能的 | ◆ 软件环境:泰科智能软件PLC软件 |
| • 如何进行基本的硬件连接 |
CANopen基本配置 | |||
PLC的 | •
| ||
PLC与驱动器的通讯连接: |
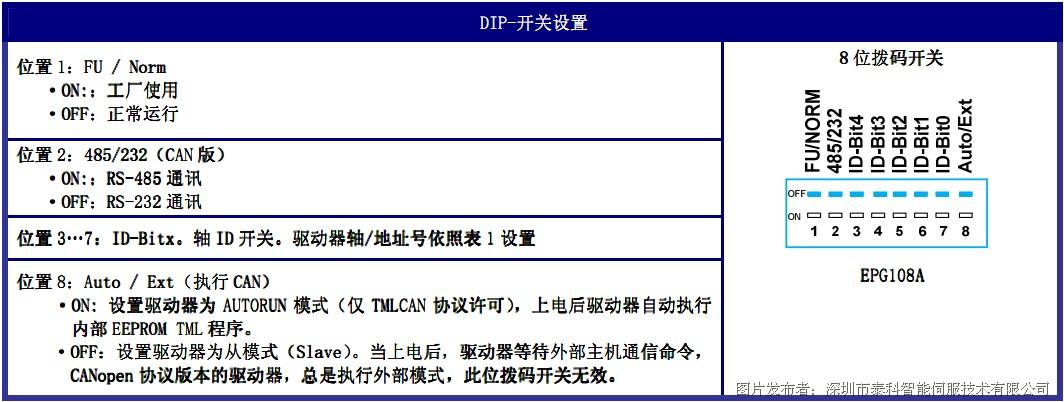
1 CANOpen接线说明
多台驱动器的连接方式: |
2 多台驱动器连接
CAN_H和120欧姆的电阻。
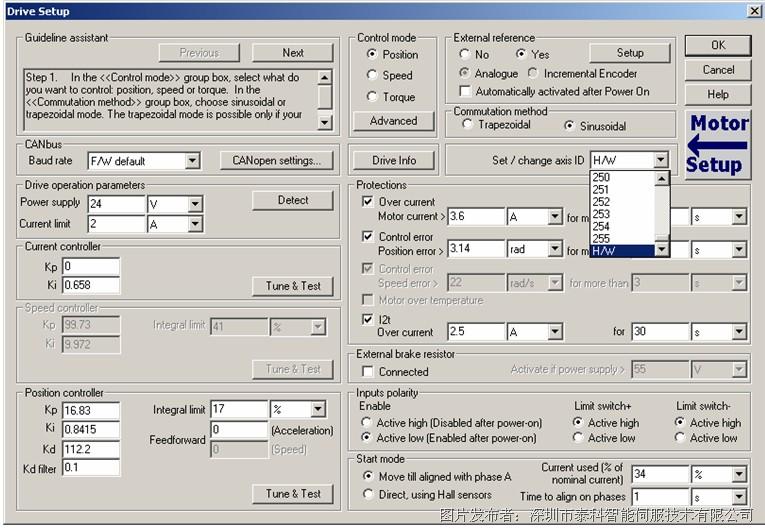
驱动器设置: | 1. 建立通讯 打开/电机参数。具体操作详见 ID号,泰科智能驱动器轴•� 硬件方式ID号范围为31/255,可由•� 软件方式1-255之间任何值,然后保存在设置表中 ID号之前通过软件设定过,而且现在不知道这个值,您可以在“Axis ID of drive/motor connected to PC” 选择RS232直接与CANbus网络中的某个节点且Communication | Scan Network也能找到这个驱动器的轴
图ID号 3. 设置CAN通信时能工作在以下波特率:1MHz。 4 驱动器
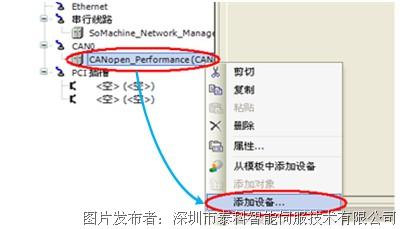
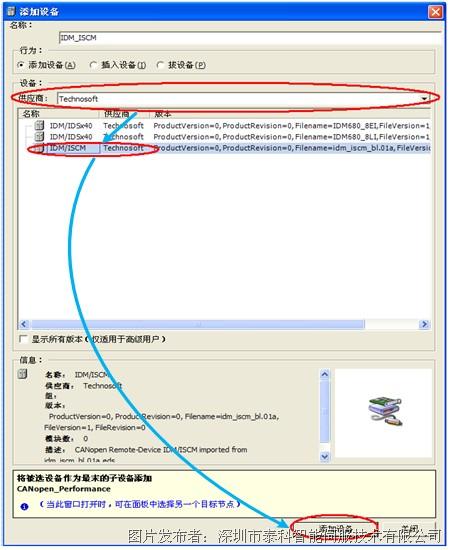
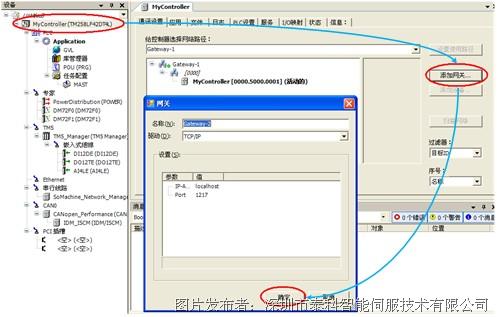
PLC项目,并导入…选项; 5 …选项; 6 EDS文件,并点击打开,导入 图 2. 添加从站。 选择…选项; 8
9 勾选图中项目,并在右键选项里点击添加设备 图 选择供应商IDM/ISCM),点击添加设备选项;
图 3. 设定主站参数。 设定主站 图 ID,应与驱动器轴 图 5. 添加网关。 勾选控制器,在展开的通讯设置界面里点击添加网关 图 选择MyController,点击设置使用路径,并按 图 6. 登陆程序。 点击图中工具栏中的登陆图标; 16 CAN子菜单栏前方会出现如图所示绿色标志,否则断电检查接线及重复以上操作。 17
|








 投诉建议
投诉建议
提交

泰科智能 直线-力矩-音圈直驱伺服系统

泰科智能 带抱闸脉冲型闭环步进伺服系统

伺服电机的工作原理与特点
泰科智能 直线电机及平台
直线伺服电动机及其应用